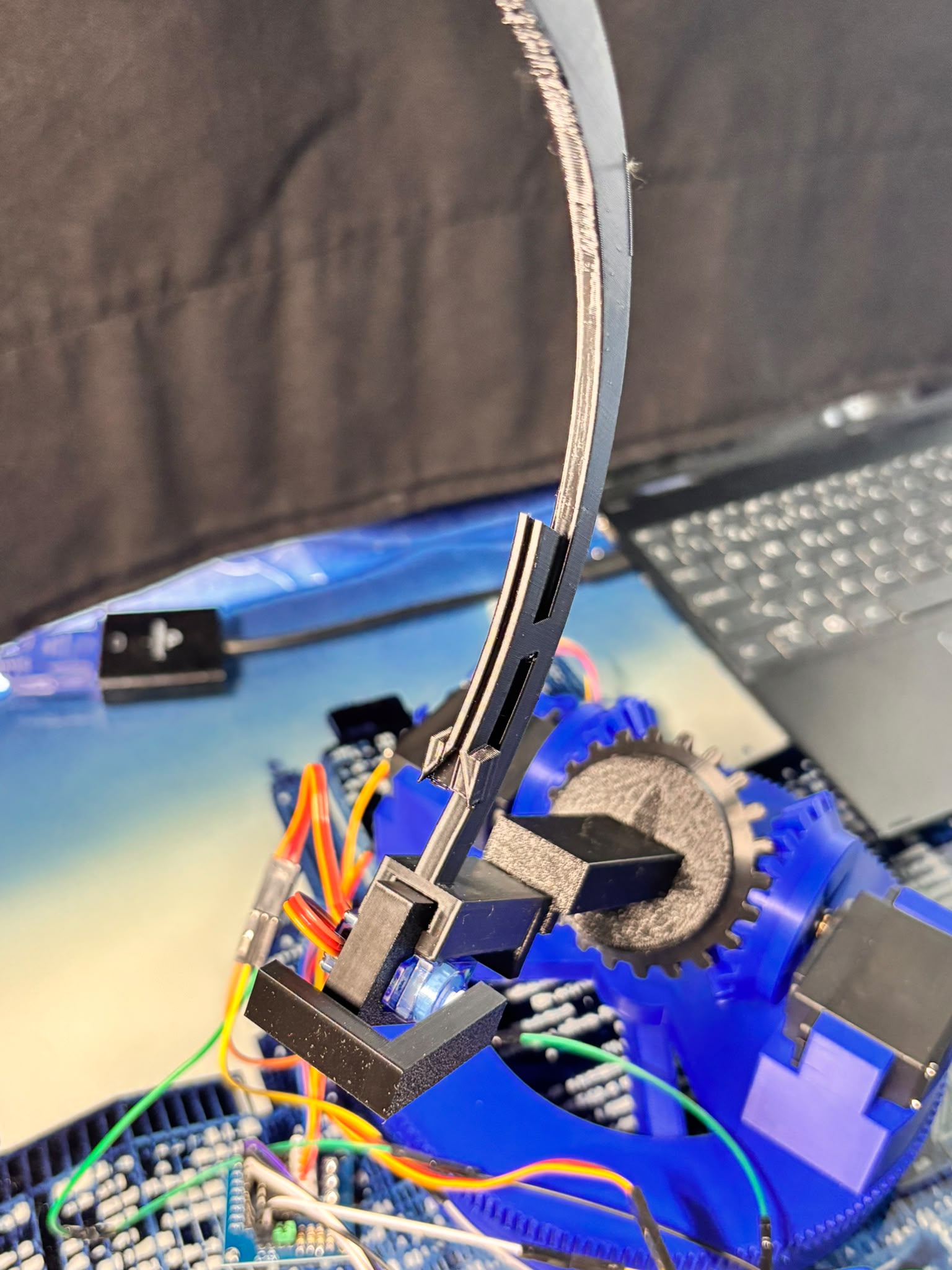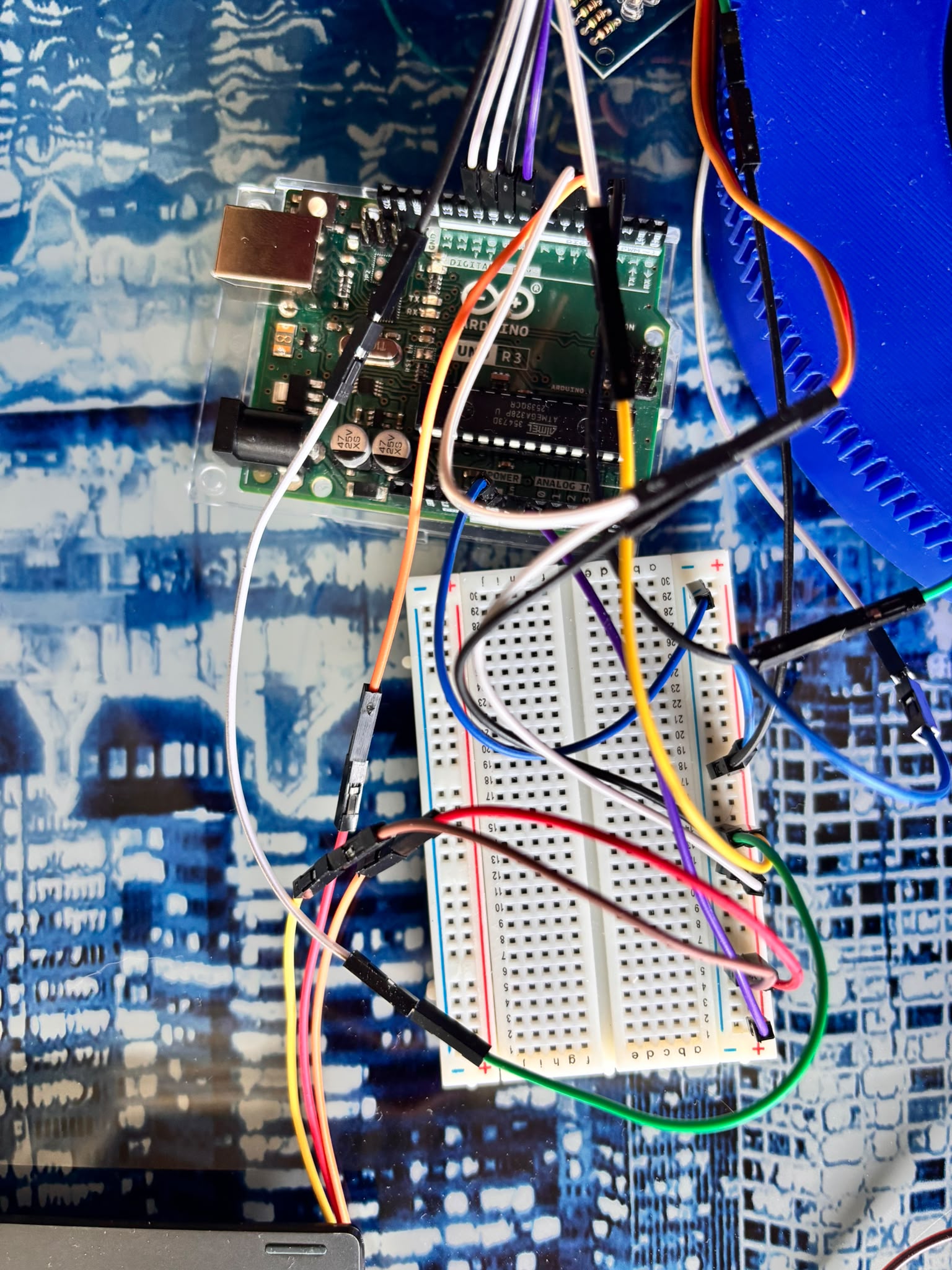
The Jukebox is a fully self-built robotic system that automates the act of playing a vinyl record. A robotic arm — driven by four motors and controlled by an Arduino Uno — descends to grip a record from a vertical holder, lifts it, rotates, and deposits it onto a turntable inherited from my grandparents.
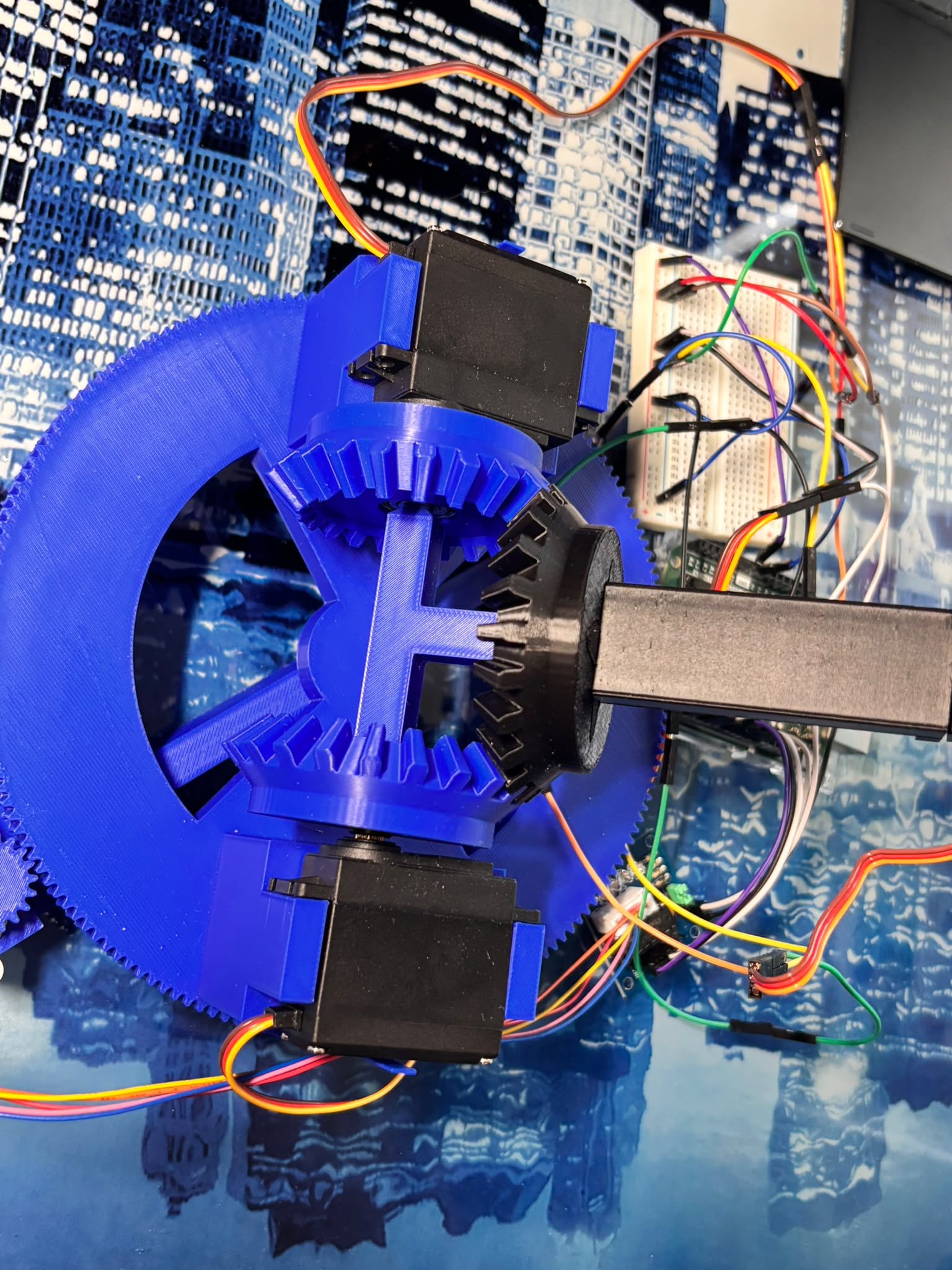
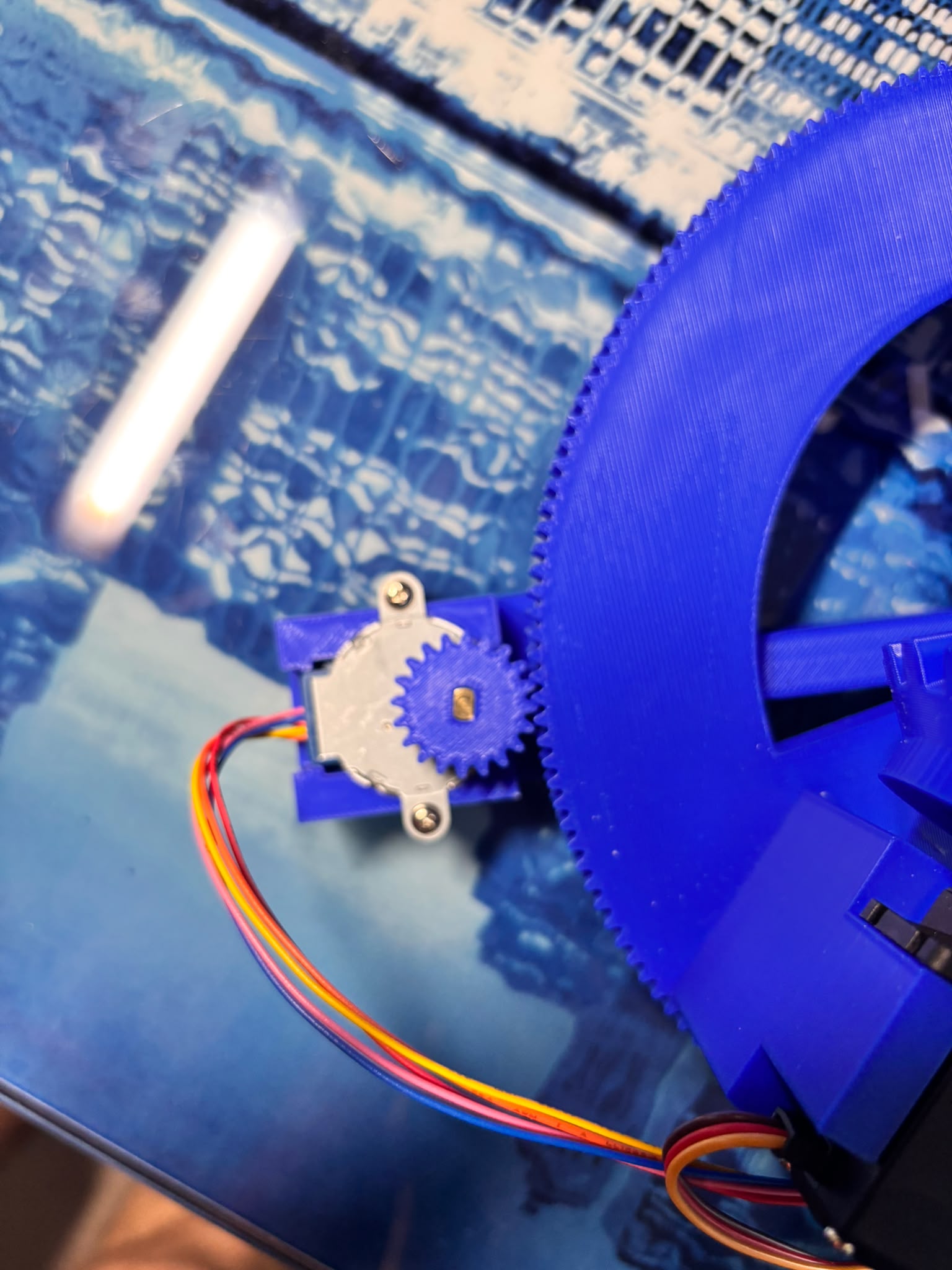
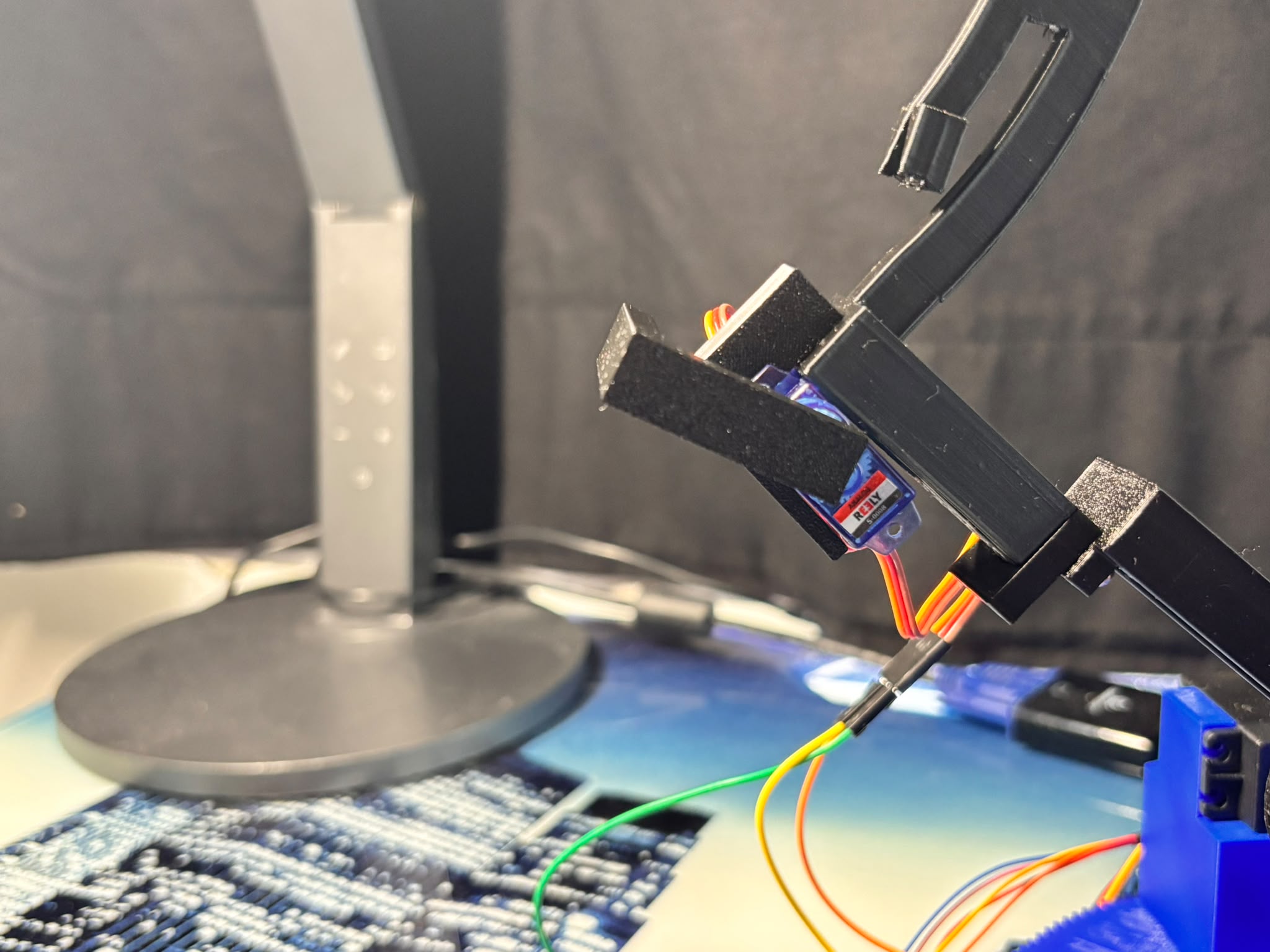
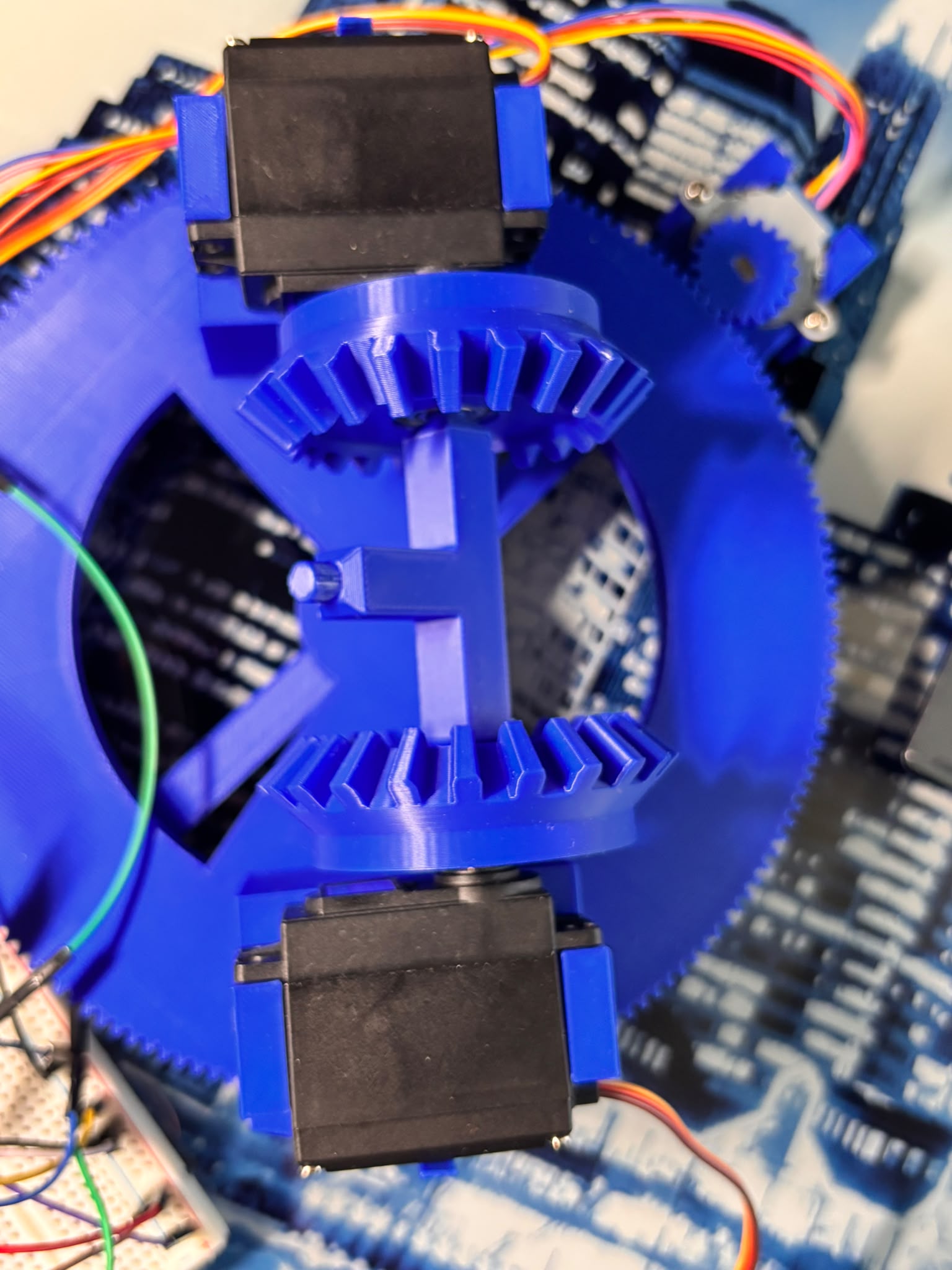
The arm moves along three axes: it extends vertically via a miter gear system driven by two 10Nm servos, rotates around its own axis using the same two servos in opposite directions, and sweeps horizontally via a stepper motor driving a large printed ring gear. A fourth mini servo on the arm clamps the record with a small horizontal bar that slots into the record's notches.
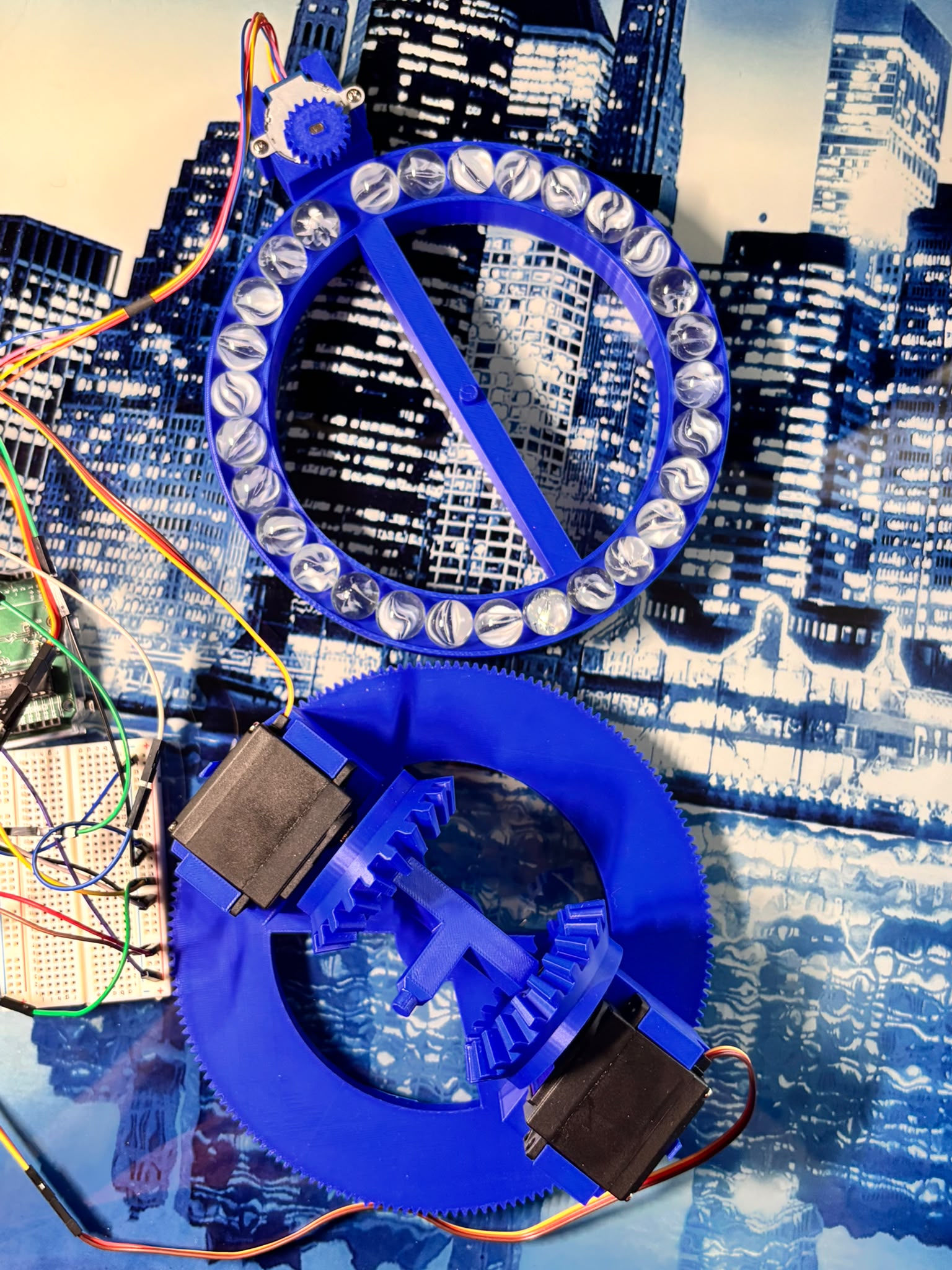
The core challenge was the kinematic design. After considering rails, rotating carousels, and horizontal storage, I discovered the vintage jukebox mechanism in the reference video below — and adapted it: instead of rotating a carousel to present the record to a fixed arm, I designed the arm to rotate and reach stored records directly. This gave far more flexibility.
↗ Watch the vintage jukebox mechanism that inspired this build